!
1!
How to make a Motorized Linear Translation Stage
!
Mala!Mateen!
College!of!Optical!Sciences,!University!of!Arizona.!
November!26,!2009!
!
!
Abstract(
(
Motion!stages!allow!controlled,!precise,!and!repeatable!motion!in!a!single!degree!of!
freedom.! A!variety!of!different!stages!are!available!on!the!market!which!allow!linear!
translation,! rotation,! tilt,! and! even! multi‐axis! motion.! In! this! tutorial! we! will!
concentrate! on! building! a! motorized! linear! translation! stage.! Purchasing! ready‐
made! motorized! linear! stages! can! be! very! expensive,! for! instance! a! linear!
translation!stage!allowing!12!mm!of!travel! in!one!direction! with!a!stepper!motor!can!
cost!between!$1500!to!$2000!from!Thorlabs![1].!Below!we!outline!a!cost!effective!
way!to!build!a!motorized!linear!translation!stage.!!
!
!
Introduction(
(
A!linear!stage!is!used!to!allow!motion!along!one!degree!of!freedom!and!to!constrain!
all!other! degrees!of! motion.!Linear! stages!can! allow!rotation! about!roll,! pitch,!and!
yaw!angles!or!translation!along!x,!y,!and!z!axis![2].!!A!linear!motion!stage!consists!of!
the!following!parts:!
!
1).!Linear!stage!or!carriage!
2).!Rails!
3).!Stepper!driver!
4).!Stepper!motor!with!linear!actuator!
5).!Opto‐interrupter!
6).!Lab!power!supply!
!
The!resolution!of!the!stage!is!quantified!by!the!step!size!of!the!stepper!motor!and!
the!repeatability!is!driven!by!how!much!friction!is!present!between!the!rail!bearings!
and!the!carriage.!!Repeatability!and!resolution! are!also!driven!by!how!accurately!the!
motor! responds! to! commands.! It! is! important! that! the! stage! and! rails! are! able! to!
withstand! the! wait! of! the! instrument! that! you! want! to! move,! with! out! deforming!
otherwise! the! performance! of! the! ball! bearings! and! the! length! of! the! translation!
stage!will!be!affected.!Proper!locking!mechanism!for!the!stage!needs!to!be!in!place!to!
give!the! linear!stage!stability.! To!avoid! driving!the! linear!actuator! clear!out!of! the!
stepper!motor!or!to!avoid!driving!the!instrument!off!the!stage!proper!calibration!!of!
step! size! to! linear! translation! needs! to! be! performed! at! the! beginning! to! the!
experiment.!!
!
!
2!
!
!
Linear(Sage(and(Slide(
(
The! linear! stage! is! what! the! instrument! (camera,! membrane,! or! mirror)! that! we!
want!to!move,! sits!one.!It!consists!of!one!or! more!slides!sandwiched!between!two!
metal! plates.! ! The! instrument! is! bolted! on! to! the! top! plate,! which! is! free! to! move!
with!the! slides.!The! bottom!plate! is!locked! to!the! optical!bench.!The!lead!actuator!
bores!into!the!top!metal!plate!producing!the!translation.!
!
!The!slides!plus!the!flat!metal!plates!should!be!able!to!withstand!the!weight!of!the!
instrument! without! deforming.! Therefore! a! material! with! high! specific! stiffness!
should! be! used.! The! metal! plates! should! be! wide! enough!to!comfortably!span!the!
breadth! of! he! instrument.! ! For! large! instruments! two! slides! can! be! used! to! lend!
stability.!The!two!rails!can!then!be!appropriately!positioned!on!the!metal!plates!to!
allow!smooth!translation.!!
!
The!performance!of!a!translation!stage!is!determined!by!the!type!of!bearings!used.!
There!are!a!variety!of!different!types!of!rails!or!slides,!four!major!types!of!slides!are!
dovetail!slides,!ball! bearing! slides,!crossed! roller! bearings,!and! flexure! suspension!
[2].!
!
Dovetail! slides! are! the! simplest! type! linear! translation! slides.! They! consist! of! two!
flat! surfaces! sliding! against! each! other! with! the! geometry! shown! in! figure! 1(a).!
Dovetail!slides!have!relatively!high!stiffness!and!load!capacity.!They!are!resistant!to!
shock!and!fairly!immune!to!contamination.!The!friction!of!dovetail!slides!varies!with!
translation!speed,!which!makes!precise!control!difficult!and!limits!the!resolution!of!
the!stage.!!!
!
Ball!bearing!slides!reduce!friction! by!replacing! sliding!motion!with!rolling!motion.!!
In!this!arrangement!the!balls!are!allowed!to!slide!back!and!forth!against!steel!rods!
known! as! guides!ways!(Figure! 1! (b)).! ! The! friction!between!the! ball! bearings! and!
guide!ways!is!very!low!resulting!in!smooth!travel!with!the!capability!to!make!small!
controlled! movements.! The! ball! bearings! make! contact! with! the! guide! ways! at! ! a!
single! location! allowing! the! dirt! to! be! pushed! out! instead! of!getting!trapped.!This!
makes!the!ball!bearing!slides!relatively!insensitive!to!contamination.!!
!
Crossed! roller! bearings! replace! the! point! contact! of! ball! bearings! with! the! line!
contact!of! a!roller.!This!leads!to! higher!load! capacity!and!higher!stiffness.!Crossed!
roller!bearings!require!more!care!during!assembly!resulting!in!higher!costs!and!are!
thus! reserved! for! applications! that! require! the! greatest! stability,! stiffness,! and!
robustness.!!
!
Flexures!use!elastic!deformation!to!control!motion!(Figure!1!(d)).!!Since!there!is!no!
sliding! or! rolling! contact! between! the! moving! parts! of! the! stage,! friction! is!
completely!eli minated.!!Flexure!suspension!allows!higher!stiffness!and!higher!load!

!
3!
capacity.!The!disadvantages!of!flexures!are!smaller!range!of!travel,!susceptibility!to!
vibration,!and!a!small!amount!of!cross!coupling!between!axes.!!
(
(
(((((((((((((((((((((((((((( (
(
Figure*1.*Four*different*types*of*slides*are*shown,*a)*Dovetail*slide,*b)*Ball*bearing*
slide,*c)*Crossed*roller*bearing,*and*d)*Flexure*[2].*
(
(
Stepper(Motor(Based(linear(actuator(
(
A! stepper! motor! operates! by! converting! rotary! motion! to! linear! motion.! ! Stepper!
motors!move!a!given!amount!of!rotary!motion!for!each!electrical!impulse.!!Current!
stepper!motors!on!the!market!can!obtain! resolutions!from!18!rotational!degrees!per!
step! to! 0.9! rotational! degrees! per! step.! ! Permanent! magnet! stepper! motors!
incorporate!a!permanent!magnet!rotor,!coil!windings,!and!a!steel!stator!capable!of!
carrying! a! magnetic! flux.! ! Energizing! the! coil! creates! a! magnetic! flux! as! shown! in!
Figure!2.!!The!stator!conducts!the!magnetic!field!and!causes!the!permanent!magnet!
rotor!to!be!aligned!to!the!magnetic!field.!The!stator!magnetic!field!can!be!altered!by!
sequentially! energizing! and! de‐energizing! the! stator! coil.! This! causes! a! stepping!
action!and!incrementally!moves!the!rotor!resulting!in!angular!motion.!A!one‐phase!
stepping!sequence!is!depicted!in!Figure!3![3].!
!

!
4!
!
Figure*2.*A*north*to*south*magnet*field*is*created*and*magnetic*flux*is*generated*in*the*
coil*[3].*
*
!
!
*
Figure*3.*Illustrates*the*step*sequence*for*a*2Gphase*motor.*In*step*1*phase*A*of*the*2*
step*stator*is*energized.*This*magnetically*locks*the*rotor*in*the*position*shown*since*
opposite*magnetic*poles*attract.**When*phase*A*is*turned*off*and*phase*B*is*turned*on*
the*rotor*moves*90
°
*clockwise.*In*step*3*phase*B*is*turned*off*and*phase*A*is*turned*on*
with* the* polarity* reversed* from* step* 1.* This* causes* another* 90
°
* rotation.* In* step* 4*
phase*A*is*turned*off*and*phase*B*is*turned*on*with*the*polarity*reversed*from*step*2.*
Repeating*this*sequence*causes*the*rotor*to*rotate*in*90
°
*increments*[3].**
!
A!linear!actuator!produces!a!linear!translation.!!Inside!the!rotor!there!is!a!threaded!
precision! nut!with!a! lead! screw.! The!lead!screw! in! turn! is!fixed!to! the! translation!
stage!with!a!nut.! As!the!rotor! turns!linear!motion!is!achieved! directly!through!the!

!
5!
nut! and! threaded! screw.! The! size! of! the! leadscrew! depends! on! the! range! of!
translation! required.! The! precision! of! the! motion! depends! on! the! step! size! of! the!
stepper!motor!and!on!the!coupling!between!the!motor!and!lead!screw.!The!threads!
of! the! lead! screw! allow! a! small! rotational! force! to! translate! into! a! large! load!
capability!depending!on!the!steepness!of!the!ramp,!which!is!a!function!of!the!lead,!
pitch,!and!diameter!of!the!screw.!!A!small!lead!(more!threads!per!inch)!will!provide!
a!high!force!and!resolution!output.!A!large!lead!(fewer!threads)!will!provide!a!lower!
force,! but! correspondingly! higher! linear! speed.! An! example! of! different! lead!
configurations!is!shown!in!Figure!4![4].!!
!
!
!
Figure*4.*Four*different*leadscrews*showing*four*different*leads*[4].*
!
In!choosing!a!rotor!plus!leadscrew!you!need!to!consider!how!much!torque/force!is!
required?! What! is! the! duty! cycle,! desired! step! increment,! step! rate,! and! max!
translation!range.!!Bipolar! or!unipolar!coils! are!selected!depending!on!whether!or!
not! dual! directional! motion! is! needed)?! We! also! need! to! consider! life! expectancy!
requirement!and!environmental!constraints.!!A!stepper!driver!is!used!to!drive!the!
stepper!motor!and!linear!actuator.!!
(
Apparatus(and(Assembly(
!
In!this!section!we!construct!a!motorized!linear!stage!for!a!specific!application!listing!
the!particular!parts,!where!to!purchase!them,!and!how!to!assemble!the!parts!to!have!
an!operational!motorized!linear!translation!stage.!!We!list!all!the!parts!needed!and!
where!they!can!be!purchased!in!Table!1.!
!
!
!
!
!
!
!
!
!

!
6!
Part!
Part!
Number!
Quantity!
Part!
Description!
Vendor!
Cost!
Alumin um!
block!
N/A!
1!
20!x!100!x! 200!mm!
plates!to!form! the!
base!and!top!of!the!
translation!stage.!
90°!Corner!Plate!
(100!m m!in!length)!
to!mount!
add itional!
components!
Alumin um!
block!found!in!
lab! and !cut!in!
the!machine!
shop.!Can!also!
be!purc hased!
from!
McMaster‐
Carr.!
$0!
Telescopic!ball!
bearing!slides!
8379K1!
2!
76!mm!stroke!
length.!
McMaster‐
Carr!
$90 .89/eac h!
Stepper!motor!
+!le adscrew!
28F49‐!
05‐023ENG!
1!
Non‐captive,!series!
28000,!size!11!
with!4!in!
leadscrew.!
Haydon!Kerk!
$12 0.88!
Stepper!dri ver!
Kit!
EZHR17ENSK!
1!
1!EZHR17EN!
stepper!motor!
controller!+!driver.!
1!RS485!co nverter.!
1!opto‐inte rrupter.!
All!Motion!
$22 5!
Hex!nut!
932827A225!
1!
Used!to!bolt!the!
leadscrew!to!the!
translation!stage!
McMaster‐
Carr!
$11 .55/pack!
of!1 00.!
Socket!cap!
screw!
92196A533!
4!
¼‐20.!Used!to!bolt!
aluminum!posts!to!
the!aluminum!base!
plate.!!
McMaster‐
Carr!
$3.53! /! pack!
of!2 5.!
Socket!cap!
screw!
92196A619!
4!
3/8‐16.!Used!to!
bolt!the!slides!to!
the!aluminum!base!
plate.!
McMaster‐
Carr!
$6.95! /pack!
of!10.!
Set! screws!
91375A33!
6!
¼‐20!cup.!
McMaster‐
Carr!
$11 ! /! pa ck! of!
$10 0.!
Posts!
NT59‐754!
6!
3!in !p osts!with!¼‐
20!stud!at!the! top!
and !¼‐20!t apped!
threaded!hole!at!
bottom .!
Edmun d!
Opt ics.!
$9.75/post!
Power!Supply!
Instek!PST‐
3201!
1!
Lab!power! supply!
Teq uipment!
$87 3!
!
Table*1.*List*of*the*apparatus*needed*to*build*and*drive*a*linear*translation*stage.*
!
!
The!application!is!to!move!and!Andor!iXon!camera!through! a!distance!of!about!60!to!
70! mm! in! 1.5! mm! increments.! The! camera! weights! 4.5! kg! (~10! lbs).! There! is! no!
hard‐set! constraint! on! the! speed! with! which! to! move! the! camera.! ! From! these!
requirements!we!can!determine!the!size!of!the!lead!screw,!the!power!of!the!stepper!
motor,!and!the!step!size!or!resolution!needed.!!The!following!formula!can!be!used!to!
determine!the!power!of!the!motor![3]:!

!
7!
!
Power
linear
!(watts!)!=![distance!travelled!(m)*!force!(N)]!/![time!taken!(sec)]!!
!
Several!options!of!motors!based!on!frame!sizes!and!power!are!available!from!the!
vendor!Haydon!Kerk.!Figure!5!shows!plot!of!force!vs.!speed!provided!by!the!vendor.!
This!plot!is!very!helpful!in!choosing!the!correct!motor!for!your!application.!!
!
!
!
!
Figure*5.**Power*curves*showing*the*performance*of*the*28000*series*size*11*stepper*
motors*[3].*
!
Based!on!the!above!plot!if!we!want!to!move!a!camera,!which!weighs!about!10!lbs!at!
a!speed!of!0.4!in./sec.!we!will!opt!for!motor!9.!!This!motor!provides!a!resolution!of!
0.0025! in./step!(0.0063mm/step).! For! our!application!we! select! the!28000!series,!
Non‐captive,!size!11!stepper!motor!with!a!4!inch!lead!screw.!The!characteristics!for!
this!motor!are!provided!in!the!Table!2![5].!
!!!!!!!!!!!!!!!!!!
!

!
8!
!!!!!!! !
Table*2.*Salient*characteristics*for*a*Series*28000,*size*11*motor*[5].*
*
!
To! power! the! stepper! motor! we! used! the! EZHR17ENSK! starter! kit,! which! can! be!
purchased! from! All!Motion! [6].! The! kit! includes! an! EZHR17EN! (2! Amp,! 40! V)!
stepper! motor! controller! plus! driver,! and! RS485! converter! and! cables.! We!
purchased! the! Instek! PST‐3201! power! supply! from! Tequipment.! This! is! a! fairly!
fancy!and!hence!expensive!power!supply.!A!cheaper!more!basic!power!supply!can!
easily!be!substituted.! !Follow!the!instructions!below!and!look!at!the!hookup!diagram!
shown!in!Figure!6!to!power!the!stepper!motor:!
!
1. Start!with!power!supply!OFF.!Connect!power!supply!to!RS485!converter.!
2. Turn!power!on,!confirm!current!is.!!Turn!power!off.!
3. Connect!EZ!stepper!to!RS485!Converter.!
4. Connect!stepper!motor!to!middle!four!pins!of!the!motor!connector!as!shown!in!
the!diagram!below.!Motor!should!execute!a!factory!stored!command.!
5. If!address!switch!is!not!already!at!1,!set!it!to!1!with!Phillips!screwdriver.!
6. Turn!power!ON.!!
7. Connect!RS485!converter!to!computer.!
8. Launch! a! terminal! window! on! your! Linux! machine! and! type! the! following!
command.! >! echo! “/1A100000R”! >! /dev/ttySO.! This! will! move! the! stepper!
motor!to! an!absolute!position! 100000.!Similarly! there!are! other!commands! in!
the!EZ!stepper!manual!that!show!you!how!to!zero!the!location!etc.!!

!
9!
9. Send!commands!to!drive!the!lead!screw!to!its!maximum!length!so!that!only!one!
thread! is! visible! from! the! back! end! of! the! motor.! Measure! the! length! of! the!
leadscrew!emerging!from!the!stepper!motor.!Note!how!many!steps!it!took!to!get!
to!this!position!and!use!this!information!to!calibrate!the!stepper!motor.!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!! !
!
Figure*6.*Schematic*showing*how*to*connect*the*EZ*Stepper*to*the*RS485*converter,*
the*power*supply*and*the*computer.**
!
!
!
Figure*7.*diagram*illustrating*how*to*connect*stepper*motor*to*motor*connector*[6].!
!
!
10!
!
!
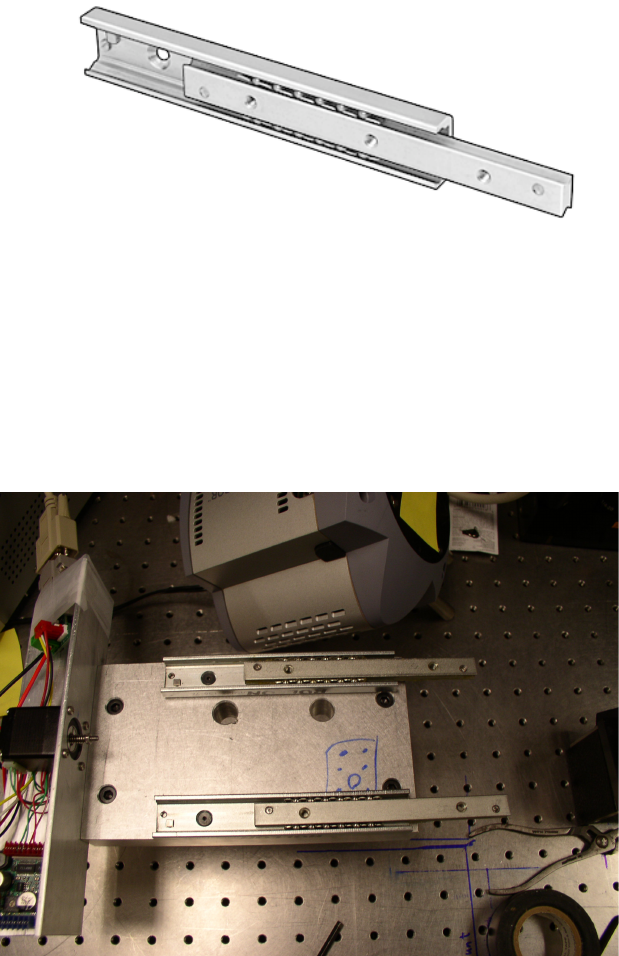
We!opt!for!ball!bearing!rails!that!can!be!purchased!from!McMaster‐Carr!(Figure!8)!
[7].!!
!
!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!! !
Figure*8.*Telescopic*Ball*bearings*[7].*
!
!
We!choose!a!20!x!100!x!200!mm!Aluminum!plate!to!serve!as!the!base!of!the!linear!
translation!stage.!The!rails!are!mounted!on!the!Aluminum!plate!(Figure!9)!and!the!
linear!stage!is!locked!to!the!optical! bench!using!3!inch!posts!with!¼‐20!tapped!holes!
at!the!bottom!and!¼‐20!studs!at!the!top!(see!Figure!10).!
!
!
!!!!!! !!!!
!
Figure*9.*Ball*bearing*slides*screwed*onto*the*base*of*the*translation*stage.*Y ou*can*also *see*
the*stepper*motor*bolted*to*the*90
°
*corner*plate.*The*linear*actuator*or*lead*screw*can*be*seen*
emerging*from *the*hole*cut *out*in*the*plate.**
!

!
11!
!
!
Figure*10.*Translation*stage*locked*to*the*optics*bench*with*four*3*in*posts.*
!
!
The! stepper! motor! along! with! the! lead! screw,! the! RS485! converter,! and! the! EZ!
Stepper!are! mounted!onto! a!90°! corner!plate! made!of!Aluminum!(Figure!11).!The!
corner!plate!is!bolted!to!the!translation!stage!and!moves!with!it.!The!stepper!motor!
is!bolted!onto!the!corner!plate!in!which!a!hole!is!cut!out!from!which!the!leadscrew!
emerges!and!drives!the!translation!stage!(Figure!9).!The!EZ!stepper!and!the!RS485!
converter! are! held! onto! the! plate! with! tape.! The! camera! is! mounted! onto! the! top!
plate! of! the! translation! stage! by! screwing! two! 3! inch! posts! onto! the! ball! bearing!
slides! that! are! in! turn! screwed! to! the! base! of! the! translation! stage.! The! final!
assembly!for!the!motorized!linear!translation!stage!is!shown!in!Figure!12.!

!
12!
!!!!!!!!!!!!!!!!!! !
!
Figure*11.*From*right* to*left*RS485*Converter,*stepper*motor*with*leads crew,*and*E Z*Stepper*mounted *
on*to*the*90
°
*cor ner*plate.**
!
(
!
Figure* 12. * Fully* assemb led* mo torized* linear* translation*stage*with* the*came ra* mounted.* *The*base*of*
the*translation*stage*si ts*on*4*posts*and*is*lock ed*to*the*op tics*bench. *The*90
°
*co rner*plate*is*mounted*to*
the*base*of*the*translation*stage*and*is*thus*also*locked*to*the*optics*bench.*The*top*of*the*tran slation*
stage*is*screwed*to*two*ball*bearing*slides*and*translates*as*the*linear*actuator*is*driven*by*the*stepper *
motor.* The* camera* is * bolted* to* the* top* plate* of* the* translation* stage* with* two* posts.* Th e* camera*
translates*with*the *top *plate.*!
(

!
13!
(
(
Conclusion(
!
In! this! tutorial! we! have! shown! a! cost! effective! way! to! build! a! motorized! linear!
translation! stage.! A! ready! made! translation! stage! without! the! power! supply! costs!
between! $1500! to! $2000! from! a! vendor! such! as! Thorlabs.! Whereas! constructing!
your!own!motorized!translation!stage!will!cost!you!only!$500!to!$600!depending!on!!
whether!you!can!salvage!metal!plates,!screws!and!nuts!from!the!lab!and!have!them!
machined!to!need!from!the!machine!shop!or!whether!you!need!to!purchase!them.!
!
The! tutorial! explains! how! to! select! slides! based! on! the! precision! requirements! of!
your! experiment.! It! also! walks! you! through! how! a! stepper! motor! produces! a!
rotation!and!how!that!rotation!translates!to!linear!motion.!The!tutorial!guides!you!in!
selecting!the!right!power!and!resolution!for!the!stepper!motor!and!shows!you!how!
to!power!and!control!the!stepper!motor!using!the!EZ!Stepper!starter!kit.!!
!
(
!
References(
(
[1]!Retrived!from! ThorLabs!Sales!w eb! site:!
htt p:/ /w ww.thorlabs.com/NewGroupPage9.cfm?ObjectGroup_ID =2163!
!
!
[2]!Burge,!J.!P rec ision!Motion:!Use!of!s tag es![PDF!document]. !Ret rieved!from!Lecture !Notes!
Online! Web! site:!
htt p:/ /w ww.optics.arizona.edu/optomech/Fall09/Note s/19%20stages.pdf!
!
[3]! Stepper! M otor! Technical! Overv iew:! Tutorial.! Retrieved! from! Haydon! Kerk! Resources!
Online!Web!site:!!
htt p:/ /w ww.haydonkerk.c om/LinkClick.aspx?fileticket=ejPD9ZRlN%2 bw%3d&tabid=221!
!
[4]! Overview! of! Leadscrew ! Assemblies :! Retrieved! from! Haydon! Kerk! Re sources! and!
Down loa ds! Online! Web! site:!
htt p:/ /w ww.haydonkerk.c om/LinkClick.aspx?fileticket=jr80Y bT3t4M=&tabid=258!
!
!
[5] !Retrieve d!from!Hayd on! Kerks!Sales!On line!Web !site:!
htt p:/ /w ww.haydonkerk.c om/Prod ucts/StepperMotorL ine arActuators /HybridLinearActua
tor s/280 00Series/tabid/75/Default.aspx#chart!!
!
[6]!EZ!Steppe r!S tarter!Kit:! Tutorial![A!pdf!doc ument].!Retrieved!from!All!Motion!On line!Web!
site:!!http://www.allmotion.com/PDF_Datasheets/EZ_Start.pdf!
!
!
[7] ! Drawing! for! Tel esc opic! Bal l! Bearing! Slide! retrieved! from! McMaster‐Carr! Sales! Online!
Web!site:!http://www.mcmaster.com/#linear‐ motio n‐s lides/=4o9o1e!
